Компания Токио Дэнрёку, являющаяся оператором аварийной атомной электростанции «-Фукусима дай-ити»-, прекратила попытки вернуть назад робот-зонд, который остается без движения внутри одного из реакторов АЭС. Токио Дэнрёку впервые запустила этот робот с дистанционным управлением внутрь защитной оболочки реактора №1 в пятницу. Этот змееобразный робот длиной 60 сантиметров должен был провести изучение повреждений внутри защитной оболочки. Однако он остановился, продвинувшись примерно на 10 метров.
Представители компании также отложили планы проведения в понедельник аналогичного изучения внутри той же защитной оболочки с использованием другого робота. Как они объяснили, такое решение было принято из-за того, что кабель первого робота в канале защитной оболочки препятствует прохождению туда второго зонда.
Эх, и это ЯПОНИЯ ! В моем воспаленном мозгу там уже «-по улицам роботы должны ходить»- !
Тем временем в «-дикой России»- …-

-
В 2009 году компания ЗАО «Диаконт» работала на Билибинской АЭС, где первый энергоблок подошел к окончанию 30-летнего проектного срока эксплуатации. Станция состоит из четырех одинаковых энергоблоков общей электрической мощностью 48 МВт с реакторами ЭГП-6 (водно-графитовый гетерогенный реактор канального типа). Там с применением робототехнических аппаратов провели диагностику кожуха реактора и металла бака биологической защиты (ББЗ) энергоблока № 1. Процесс контролировался с помощью специальной телевизионной системы. Такие комплексы выявляют дефекты сварных соединений. Изобретения, которые содержит конструкция, позволяют повысить качество диагностики и существенно сократить дозозатраты. Робот может управляться всего одним человеком. Комплекс состоит из двух роботов, первый из которых – диагностический – обследует металл и зачищает поверхность, а второй – ремонтный – наносит на дефекты герметизирующую наплавку для их устранения. Комплекс сконструирован так, что робот должен проникать в реакторное пространство через отверстие диаметром со спичечный коробок. Уникальность комплекса в том, что он способен перемещаться не только по сложным горизонтальным участкам, но и по вертикальным, и проводить контроль в автономном режиме. Также к ремонту билибинского блока подключили ООО «Пролог». Его специалисты провели осмотр газового контура реактора и бака биологической защиты первого энергоблока Билибинской АЭС. Они выполнили вырезку образцов основного металла верхней плиты реактора для дальнейшего исследования его состояния. Вся работа заняла больше полутора лет, в настоящее время этот блок находится в эксплуатации.
или еще раз по простому: корпуса реакторов за время прохудились и требовался или серьёзный ремонт корпуса или заглушение. Для ремонта требовался доступ внутрь активной зоны. Естественно это было крайне противопоказано. Однако же наши робототехники сумели сделать двух змееобразных роботов, которые провели обследование корпуса и сварочные работы. диаметр механизма был 5 см. Только через эту трубу был доступ. Первый робот с ультразвуковым сканером произвёл обследование, второй со сварочным аппаратом и механизмом замены электродов (по типу степлерных скоб было размещение) произвёл сварку на прохудившихся местах.
-
-

-
И опять про «-Фукусиму»- :
Удивительно и то, что для работы на аварийной «Фукусиме» потребовались роботы иностранных компаний, ведь Япония уже в 1980-е годы лидировала в разработке и производстве роботов и робототехники. К тому же толчком к разработке роботов, действующих в жесткой радиационной обстановке, стал инцидент 1999 года, произошедший именно на японском топливном заводе «Токаимура», в ходе которого трое рабочих получили переоблучение, причем двое из них умерли. В то время все согласились, что в чрезвычайных ситуациях робот незаменим. И в 2001 году были изготовлены шесть роботов, плод совместных разработок четырех компаний, в том числе Hitachi, Mitsubishi и Toshiba. Но, когда в марте 2011 года эти роботы действительно потребовались, оказалось, что устройства списаны и разобраны.
Что же произошло? Эксплуатирующие компании были так твердо уверены, что никакой аварии на АЭС произойти не может (а возражения воспринимали как сомнения в квалификации персонала и как упрек себе лично), а работники так противились присутствию роботов, что экспертная группа, в которую вошли представители TEPCO, KEPCO и государства, постановила: роботы на АЭС не нужны. И от роботов избавились. А ведь за 10 лет практической эксплуатации на АЭС можно было бы существенно улучшить их характеристики. Один из участников оперативной группы по устранению последствий аварии на АЭС «Фукусима» в раздражении бросил: «У всех роботов атомной отрасли есть одна общая черта: их нет, когда они нужны больше всего».
Все эти битвы поднимают вопрос более широкого плана. Первопроходец разработки искусственного интеллекта Марвин Мински писал о своем потрясении неспособностью атомной отрасли приготовиться к непредвиденной ситуации. Самую большую проблему он видит в том, что АЭС проектируются без учета возможности работы удаленно управляемых устройств. И это при том, что другие сферы человеческой деятельности давно стали учитывать возможности и нужды роботов. Например, в оборудовании, предназначенном для подводных работ, напротив, многие клапаны и приводы разработаны с учетом возможности использования роботизированных манипуляторов. Заводы по производству автомобилей ныне проектируются с приоритетной интеграцией робототехники, и даже существует медицинское оборудование, специально разработанное для робототехнических платформ.
Медленный прогресс роботов для АЭС объяснить непросто, существуют лишь мнения и идеи. Одно из таких мнений заключается в том, что тема роботов и атомной энергетики тесно переплетена с их восприятием обществом и политикой. Эйдзи Коянаги, заместитель директора японского научно-технического центра «Будущее робототехники», полагает, что финансирование японской робототехники ядерного реагирования иссякло после аварии 1999 года на заводе «Токаимура», потому что страна пыталась создать впечатление кропотливой работы по созданию практически абсолютно безопасной атомной энергетики. А выделение финансирования означало бы, что ситуация может оказаться настолько опасной, что вместо людей понадобятся роботы. Изменится ли такое отношение после «Фукусимы» и каким образом Япония восстановит доверие к своему важнейшему источнику энергии, нам еще предстоит узнать.
-
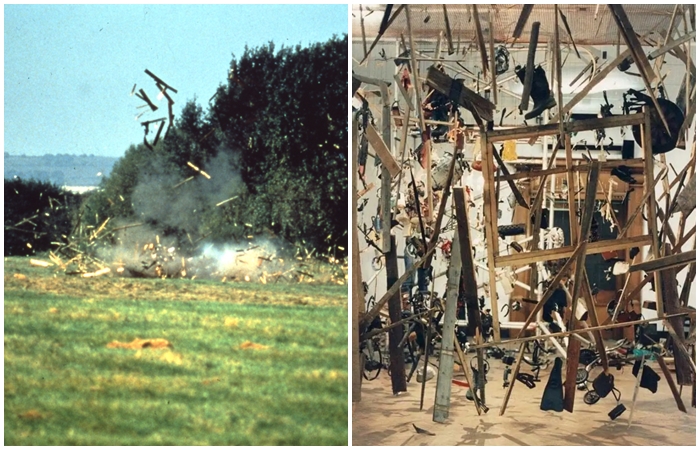
Отчего выполнить восстановительные работы на станции оказалось сложнее, чем остановить утечку нефти на тысячеметровой морской глубине? С одной стороны, станция усеяна обломками, что усложняет доступ даже для спасательных команд. Разумеется, в опасные районы можно отправить роботов и не рисковать человеческими жизнями. Но застрявший робот означает не только потерю дорогостоящего устройства, но и ухудшение доступа других роботов к труднодоступным местам.
У малого робота ограничена производительность, а большой – неповоротлив. К примеру, на «Фукусиме» слабосильному роботу PackBot (компания iRobot) никак не удавалось открыть дверь, снабженную круглой ручкой. А когда iRobot прислала робота побольше, оказалось, что у него трудности с прохождением лестничных клеток. Один из японских роботов Quince стоимостью в $ 6 млн застрял в ограниченном пространстве станции и спустя 2,5 года после аварии все еще остается в плену.
Помимо трудностей с ловкостью передвижения и управления устройством, роботы на АЭС из-за интенсивного облучения сталкиваются с проблемами надежности беспроводной связи. Ионизирующее излучение может повредить электронику физически, нарушив структуру полупроводниковых кристаллов порождением лавины электронов и смещая порог открывания полевых транзисторов. В любом случае меняются рабочие характеристики отдельных электронных компонентов, что приводит к отказу. Устройства, защищенные от радиоактивного излучения, тестируются путем измерения получаемой ими полной дозы (чаще в зивертах) до наступления неисправности. Но радиоактивные повреждения носят статистический характер, поэтому «выживание» устройства никогда не гарантируется. Передаваемые роботами изображения здания АЭС «Фукусима» искажались по мере приближения устройства к радиационно «горячим» точкам.
Могут возникать и проблемы со связью. После «Фукусимы» в NEDO разработали гибридную сотовую сеть для удаленного управления роботами, в которую входили как проводные, так и беспроводные ячейки. Реакторные здания были относительно невелики и полностью покрывались гибридной сетью. Тем не менее, их толстые бетонные стены, блокирующие гамма-лучи, делали вероятным трудности с беспроводной связью или ее невозможность.
Другой проблемой стал японский закон о радио. Из-за плотной населенности страны этот закон очень строг в отношении напряженности электрического поля и допускает мощность передатчика максимум в 10 мВт. В этом случае расстояние беспроводной связи внутри помещения составляет максимум 50 метров. Поэтому для использования более мощных радиоволн с целью управления роботами на аварийной «Фукусиме» потребовалось получить специальное разрешение от Министерства внутренних дел и коммуникаций. Выбрали устройства 2.4 GHz Contec (для робота – FX-DS540-STDM с дипольной антенной, а для операторского центра FX-DS540-LNKM-S с антенной Yagi), а также одноваттные усилители.
-
Что же дальше? Недавно Mitsubishi представила устойчивых к радиации роботов MEISTeR (Maintenance Equipment Integrated System of Telecontrol Robot), которые смогут более производительно работать на очистке АЭС «Фукусима». Эти роботы могут сгибаться, как человеческая рука, благодаря семи степеням подвижности, каждый из них способен поднимать до 15 кг груза. Наконечник манипулятора разработан таким образом, чтобы на него можно было быстро и легко закрепить различные инструменты, например, пилу, перфоратор или дрель. Компания утверждает, что разработала специальный инструмент, который может взять пробы поверхности стен и бетонных полов в загрязненных районах с глубины до 70 мм (около 2,5 дюйма). MEISTeR весит 440 кг, имеет размеры 130 см в высоту, 70 см в ширину и 125 см в длину. Он может двигаться со скоростью до 2 км / ч, причем как по ровной горизонтальной поверхности, так и по пересеченной местности. Робот даже может подниматься и спускаться по лестнице с высотой лестничных ступеней до 22 см, благодаря четырем независимо движущимся танковым трекам. Действия робота дистанционно управляемы, ожидаемая продолжительность времени работы в автономном режиме составляет два часа. Он оборудован электроникой, которая будет надежно работать в условиях радиации. Важно, что эти устройства снабжены логическими схемами, которые в случае, скажем, утечки в гидравлике смогут послать сигнал тревоги прежде, чем наступит отказ. А это означает, что их можно быстро и дешево отремонтировать.
Помимо роботов-аварийщиков, существуют интересные разработки, позволяющие проводить инспекции, так сказать, «в мирное время» – без останова реактора и без риска для операторов. Так, корпорация AREVA в 2007 году создала группу NETEC (Non-Destructive Examinations Solutions Technical Center) – технический центр по решениям недеструктивных инспекций, – в котором трудятся более 50 ученых и инженеров. Здесь разрабатывают новые технологии осмотров и новые датчики. Из разработок АREVA на сегодня испытаны и протестированы, к примеру, системы инспекции корпуса реактора MIS7 и TWS, существенно уменьшившие время остановки реактора.
Подводный робот SUSI может плавать в теплоносителе первичного контура реактора, что с помощью ультразвукового и визуального тестирования позволяет осмотреть внутриреакторные конструкции с целью подтверждения безопасности этих компонентов для дальнейшей эксплуатации. Этот робот недавно уже был применен для осмотра одной из АЭС США, название которой не раскрывается.
JASPER позволяет осуществить безопасную инспекцию стержневой сборки системы управления и защиты ядерного реактора. Новый RANGER для осмотра трубопроводов парогенераторов легко вводится на место, подлежащее осмотру.
Однако большинство подобных перспективных разработок, хоть и протестировано, но пока не прошло испытание в боевых условиях аварий или неисправности работы реактора.
-
источники
http://atomicexpert.com/content/%D1%81%D0%BB%D1%83%D0%B6%D0%B8%D1%82%D1%8C-%D0%B8-%D0%B7%D0%B0%D1%89%D0%B8%D1%89%D0%B0%D1%82%D1%8C
http://www3.nhk.or.jp/nhkworld/russian/top/news09.html
-
И еще что мы уже обсуждали про Фукусиму: вот и еще . А вот кстати, когда то была и был вот такой . Вспомним,